Addressing Anatomical Endoscopic Enucleation of the Prostate (AEEP) Training Challenges
- Ayeeshi Poosarla
- Grace Noh
- Emma Anderson
- Maya Sharma
- Jonathan Lau
- Kayla Hui
- Bennett Ye
- Laverna Yang
- Constanza Miranda, PhD
- Ahmed Ghazi, MD, MS
Abstract:
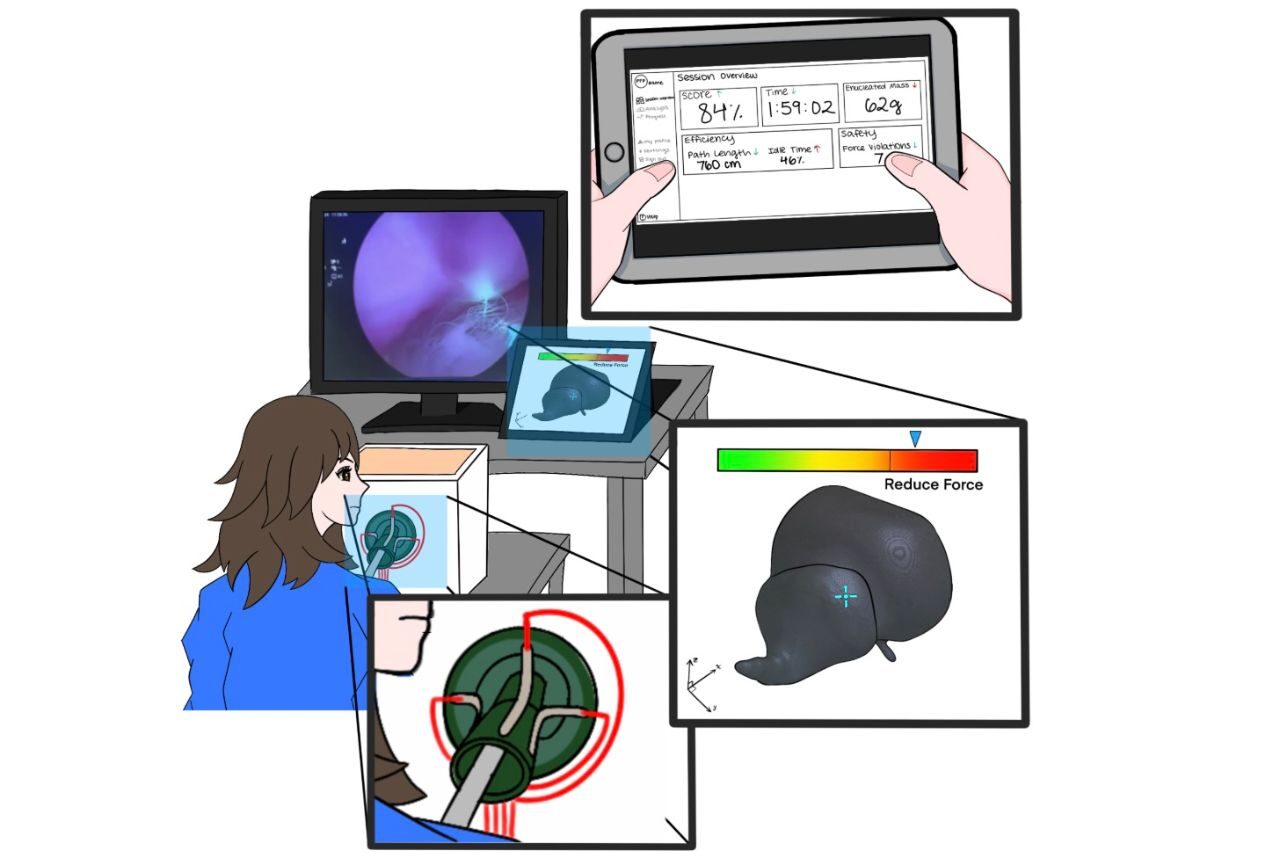
Anatomic Endoscopic Enucleation of the Prostate (AEEP) is a highly effective treatment for benign prostatic hyperplasia but remains challenging to master, requiring extensive practice and direct supervision by expert surgeons. This dependence limits opportunities for independent learning and slows trainee progression. To address this, we developed a hydrogel-based simulation model that replicates male pelvic anatomy, including the prostate and bladder. The model incorporates real-time force feedback using force sensors connected to a Raspberry Pi and Arduino. Trainees receive live visual cues, green (safe), yellow (near-threshold), and red (excessive), to guide safe and effective instrument use. An IMU sensor attached to the endoscope handle enables a dynamic minimap that tracks the tool’s position within the model. After the procedure, a feedback dashboard provides performance analytics for self-guided improvement. Our system promotes independent learning and enables efficient use of expert surgeon time, ultimately enhancing technical skill acquisition and clinical decision-making through simulation-based education.